
2018年8月24日
【Scientific Reports に掲載されました】人間の触覚の初期形成について、その仕組みの一部を解明
名古屋工業大学大学院工学研究科電気・機械工学専攻の佐野明人教授、田中由浩准教授とフアム クアン チュン博士(同大学博士後期課程修了、現生理学研究所)、星貴之博士(元同大学特任助教、現ピクシーダストテクノロジーズ(株)CTO)は、名古屋大学大学院医学系研究科・細胞生物学分野の宮田卓樹教授らとともに、異分野連携による共同研究で人間の触覚の初期形成について、新たな知見を得ました。
人間の触覚受容器の一つである速順応I型機械受容器(RA-I)の発生過程(初期変形)において、周辺環境から作用する力(外因性力)が重要な役割を担っている可能性を初めて示しました。また、シミュレーションにより、必要な外因性力を定量的に検証しました。
得られた知見は、微細かつ高感度な触覚センサの設計論や、機械受容器のように複数センサを同時形成する手法等への発展が期待されます。
本研究は、Scientific Reports![]() に掲載されました。
に掲載されました。
以下は、研究の詳細です。
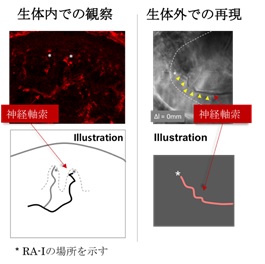
人間の触覚受容器の一つである速順応I型機械受容器(RA-I)は、微小な皮膚の動きを起こす刺激(凸凹、滑り、低周波振動等)を検出している。RA-Iなどの触覚受容器を高いレベルで理解することは、ロボット分野などでの触覚センサのデザインに重要なヒントを与える。従来手法では、皮膚の特性を排除できないため、RA-Iの特性をより精確に調べるのは困難であった。そこで本研究では、この限界を越えるために、生体外でRA-Iの様な「らせん形状」を再現した。
本研究では、生体内でのRA-Iの観察を通じ、生体外で神経軸索を使ってRA-Iの様な「らせん形状」を初めて再現した(図参照)。また、RA-Iの発生過程(初期変形)において、周辺環境から作用する力(外因性力)が重要な役割を担っている可能性を初めて示した。なお、シミュレーションによって、必要な外因性力を定量的に検証した。
従来研究では、生化学的アプローチに基づいて研究が進展してきているが、本研究では力学的な観点から新たな成果が生まれた点が独創的である。RA-Iを司る神経軸索を柔らかい紐と想定し、これが発生過程において外因性力により変形させられるという仮説を立てた。この仮説を検証するために、名古屋大学大学院医学系研究科・細胞生物学分野の宮田研究室と共同研究を実施し、画期的な成果に結び付いた。
本成果により、今後RA-Iに関する基礎研究領域で新たな道を切り拓くことができる。単なる観察に留まらず、コントロールされた環境においてRA-Iの機能に関する精密な実験が可能となり、新たな発見が得られることが期待される。さらに、得られた知見は、微細かつ高感度な触覚センサの設計論や、機械受容器のように複数センサを同時形成する手法等への発展が期待される。
Role of extrinsic mechanical force in the development of the RA-I tactile mechanoreceptor
Trung Quang Pham, Takumi Kawaue, Takayuki Hoshi, Yoshihiro Tanaka, Takaki Miyata & Akihito Sano
Scientific Reports 8, Article number: 11085 (2018)
https://www.nature.com/articles/s41598-018-29390-x![]()
お問い合わせ先
研究に関すること
名古屋工業大学大学院工学研究科 電気・機械工学専攻
教授 佐野 明人
Tel: 052-735-5348
E-mail: sano[at]nitech.ac.jp
広報に関すること
名古屋工業大学企画広報課
Tel: 052-735-5647
E-mail: pr[at]adm.nitech.ac.jp
*それぞれ[at]を@に置換してください