
2021年5月14日
チーターはなぜ地上で最も速く走れるのか? ―体幹の曲げ伸ばしによって高速走行を実現するメカニズムを数理モデルで解明―
発表のポイント
〇 チーターは体幹の曲げ伸ばしを利用して高速走行するが、その力学的なメカニズムは不明確であった。
〇 シンプルな力学モデルとチーターの計測データの解析から、チーターに特徴的な体幹の曲げ伸ばしが得られるための力学条件と、それが走行速度を向上させるメカニズムを明らかにした。
〇 シンプルなモデルの解析によって、走行の運動を生成する力学メカニズムの理解を深めるだけでなく、将来の脚ロボットの性能向上にも役立つと期待される。
概要
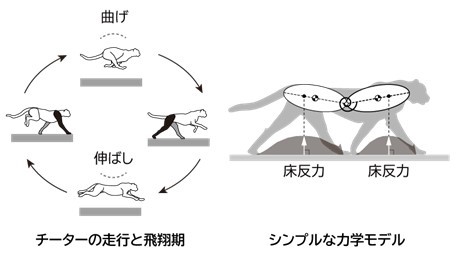
チーターは地上で最も速く走行できる動物で、体幹(注1)を大きく曲げ伸ばしするのが特徴です。走行中、全ての足が地面から離れている期間を「飛翔期」といい、チーターは体幹を曲げる飛翔期と体幹を伸ばす飛翔期の2種類を持ちます。ウマなどの動物は体幹を曲げる飛翔期しか持たない一方、チーターがなぜ2種類の飛翔期を持つことができるのか、その力学的なメカニズムは不明確でした。
名古屋工業大学大学院工学研究科 上村知也助教、山口大学農学部 和田直己教授、京都大学大学院工学研究科 青井伸也准教授、同 松野文俊教授らの研究グループは、チーターの力学モデルを用いて、チーターが2種類の飛翔期を持つメカニズムを動力学的な視点から明らかにしました。非常にシンプルな力学モデルを構築し、その運動を解析的に表した結果、2種類の飛翔期が得られるための条件が、脚が地面から受ける力(床反力)によって決定されることが示されました。また、チーターの走行の計測データとの比較を行い、モデル解析の妥当性を確認したほか、2種類の飛翔期を持つことで高速走行が実現されるメカニズムが明らかになりました。
本研究のようなシンプルな力学モデルを用いた研究は、動物の運動を生成する複雑な力学メカニズムの背後にある原理の解明に繋がります。また、動物の運動理解を進めることによって、将来的に運動能力の優れた脚ロボットなどの開発に役立つと期待されます。本成果は、5月6日(日本時間)、英国の学術誌Scientific Reportsにオンライン掲載されました。
研究の背景
チーターは地上で最も速く走行できる動物であり、その走行は体幹(注1)を大きく曲げ伸ばしするのが特徴です。観察による研究から、体幹を大きく動かすことによって、脚をより大きく前後に動かし、高い速度を達成しているのではないかと考えられています。走行中、全ての足が地面から離れている期間を飛翔期といい、チーターは体幹を曲げる飛翔期と伸ばす飛翔期の2種類を持ちます。ウマなどの動物は体幹を曲げる飛翔期しか持たない一方、チーターがなぜ異なる2種類の飛翔期を持つことができるのか、そのメカニズムは不明確でした。また、2種類の飛翔期が高速走行にどのような影響を及ぼすのかについては十分に理解されていませんでした。
本研究では、特に体幹の曲げ伸ばし運動と、それを生み出す大きな要因と考えられる床反力(注2)に着目し、チーターが2種類の飛翔期を持ち、それが高速走行に貢献するメカニズムを力学的に明らかにすることを目的としました。
研究の内容・成果
動物の運動は身体と環境の複雑な相互作用から生み出されます。運動の背後に存在する本質的な力学原理を見つけ出すため、本研究では体幹の曲げ伸ばし運動と上下運動のみを抜き出した、非常にシンプルな力学モデルを構築しました。このモデルの運動を解析的に表すことによって、2種類の飛翔期を持つ運動(図1)が得られるための条件が、脚が受ける床反力によって決定されることが示されました(図2)。
また、チーターの走行の計測データとの比較を行い、モデル解析から求められた条件が実際の運動時に満たされていることを確認しました。さらに、2種類の飛翔期を持つことで運動の周期が短くなり、高速走行を可能にするというメカニズムが明らかになりました。これによって、チーターは2種類の飛翔期を活用して地上で最高速の走行を実現していると考えられます。
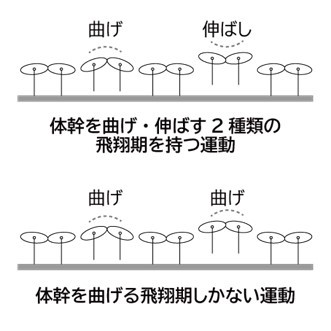
図1 2種類の飛翔期を持つ運動と、体幹を曲げる飛翔期しか持たない運動。
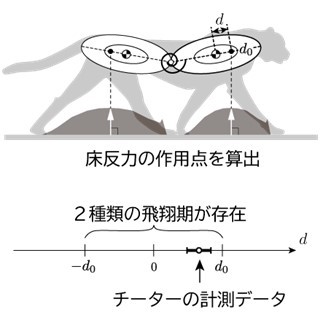
図2 チーターの運動から床反力の作用点を算出した結果、
2種類の飛翔期が存在するための条件を満たしていた。
社会的な意義
本研究のようなシンプルな力学モデルを扱う研究によって、動物の運動を生成する力学メカニズムとその背後にある原理が解明されることが期待されます。これは生物学的な観点からの研究と相補的な関係をなし、より深く動物の運動を理解することに繋がります。また、工学的には、運動能力に優れた脚ロボットなどの開発に役立つことが期待されます。
今後の展開
チーターだけでなく、ウマも高速走行を可能とする動物の一種です。チーターとウマの走行形態は飛翔期の種類が異なるなど、さまざまな相違点を持つことが知られていますが、なぜ動物種によって異なる走行を行うのか、そのメカニズムはほとんど解明されていません。本研究のようなシンプルな力学モデルを用いることは、動物の運動が実現されるメカニズムに関する未解明な問題を理解していくために重要な方法になると期待されます。
また、本研究のように解析的に運動を理解することによって、ロボットの設計論を構築することができます。例えば将来ロボットなどの人工物を設計する際に、要求される運動に対して身体をどのような重さ・長さにすればよいか?という問題が生じた場合の設計指針を決定する助けとなることが期待されます。
用語解説
(注1)体幹:動物の胴にあたる部分。
(注2)床反力:脚が地面から受ける力。
論文情報
論文名:Dynamical determinants enabling two different types of flight in cheetah gallop to enhance speed through spine movement
著者名:Tomoya Kamimura, Shinya Aoi, Yasuo Higurashi, Naomi Wada, Kazuo Tsuchiya, Fumitoshi Matsuno
掲載雑誌名:Scientific Reports
公表日:2021年5月6日(日本時間)
DOI:10.1038/s41598-021-88879-0
URL:https://www.nature.com/articles/s41598-021-88879-0
お問い合わせ先
名古屋工業大学大学院工学研究科 工学専攻 電気・機械工学系プログラム
助教 上村知也
Tel: 052-735-7446
E-mail: kamimura.tomoya[at]nitech.ac.jp